RP2350 裸机开发
今天亲自部署,亲自指挥 RP2350
Intro
在 MCU 的世界里,传统的巨头如意法(ST)或恩智浦(NXP)长期统治工业/消费级市场。然于 2021 年,凭借单板计算机(SBC)闻名全球的英国树莓派基金会(Raspberry Pi),推出了其首款自研微控制器芯片 —— RP2040。
RP2040 凭借独特的双核 Cortex-M0+ 架构、低廉的价格,以及极具革命性的 PIO(Programmable I/O) 状态机,瞬间引爆了开源硬件和嵌入式社区。
而本文的主角 RP2350,正是 Raspberry Pi(下简称rp) 在 24 年推出的第二代自研旗舰芯片。
鉴于本人有使用过 RaspberryPi4b 的经验,对 rp 的印象还算不错(?)
RP2350
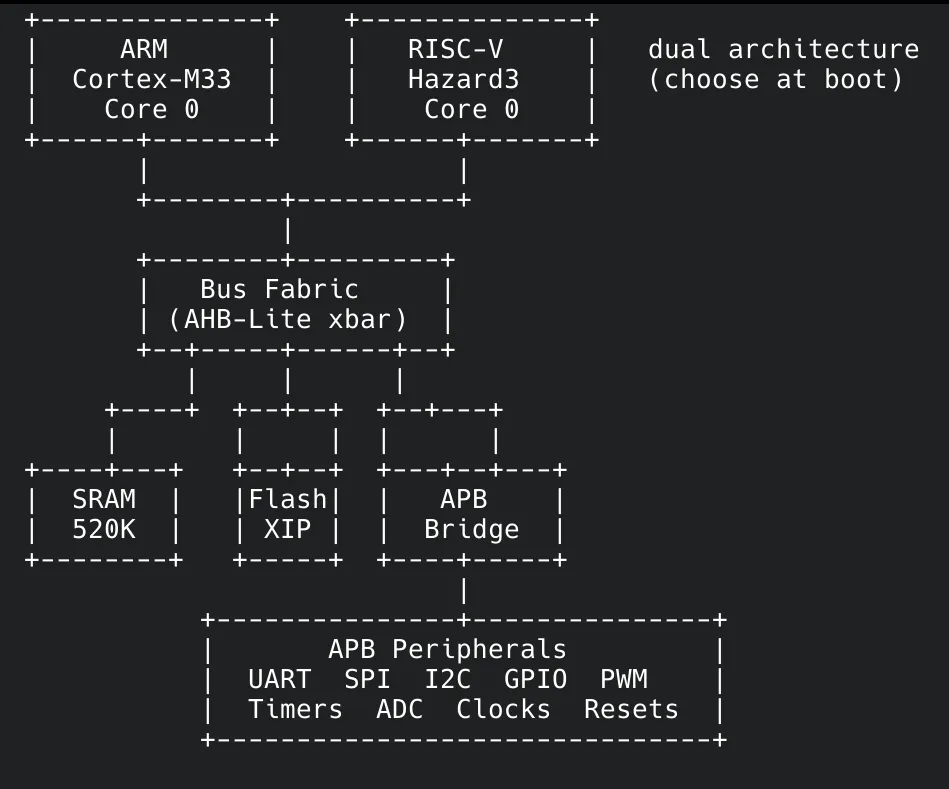
RP2350 有 Cortex-M33 和 RISC-V Hazard3 两个核心,在本文章中,以 Cortex-M33 核心为例,研究 RP2350 从上电到执行自己编写的程序的过程。
RP2350集成了 Arm Cortex-M33 内核 。相比上一代 RP2040 所使用的 Cortex-M0+,Cortex-M33 属于更现代的 ARM 微控制器架构,在性能、指令集能力以及安全性方面都有明显提升。
RP2350 的时钟主频为 150MHz,将SRAM的大小提升到了 520KB,并引入了硬件安全(TrustZone)等功能。
右图为 RP2350 的 大致结构
启动时由 BootRom 决定以哪一种架构运行
芯片内部采用基于 AHB-Lite 的总线结构,连接 CPU、SRAM、Flash 与外设模块
I2C, GPIO 等低速外设通过 APB Bridge 接到系统总线上
图源: Kevin Thomas 的仓库
Cortex-M33 基于 ARMv8-M Mainline 架构,实现了更完整的异常处理与系统控制机制,并支持更多高级特性。其采用 Thumb-2 指令集,即同时支持 16 位与 32 位混合指令编码。
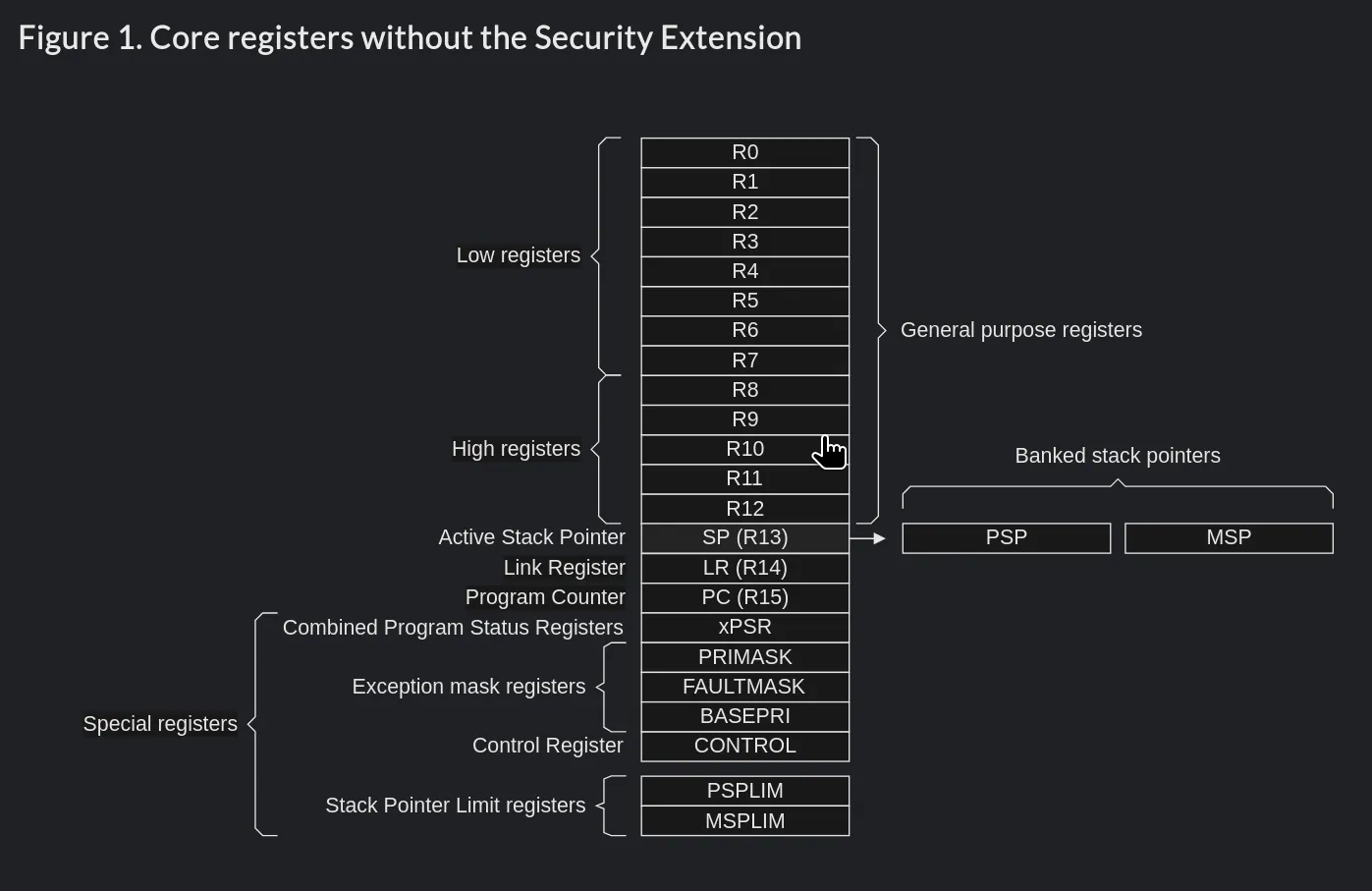
处理器内部提供了13个通用寄存器(r0–r12),以及: r13:栈指针(SP) r14:链接寄存器(LR) r15:程序计数器(PC)
图源: Arm 手册
芯片采用短小精悍的三级流水线结构:
取指令 Fetch --> 译码 Decode --> 执行 Execute- 此外,Cortex-M33 还内置了硬件整数除法器,支持: UDIV(无符号除法) SDIV(有符号除法)
- 安全性方面,支持 ARM TrustZone 技术。
- Cortex-M33 集成了嵌套向量中断控制器(NVIC),能够高效管理中断优先级与异常响应。这对于实时嵌入式系统尤为重要。
不过以上内容都超出了本篇讨论的范围😋
Board
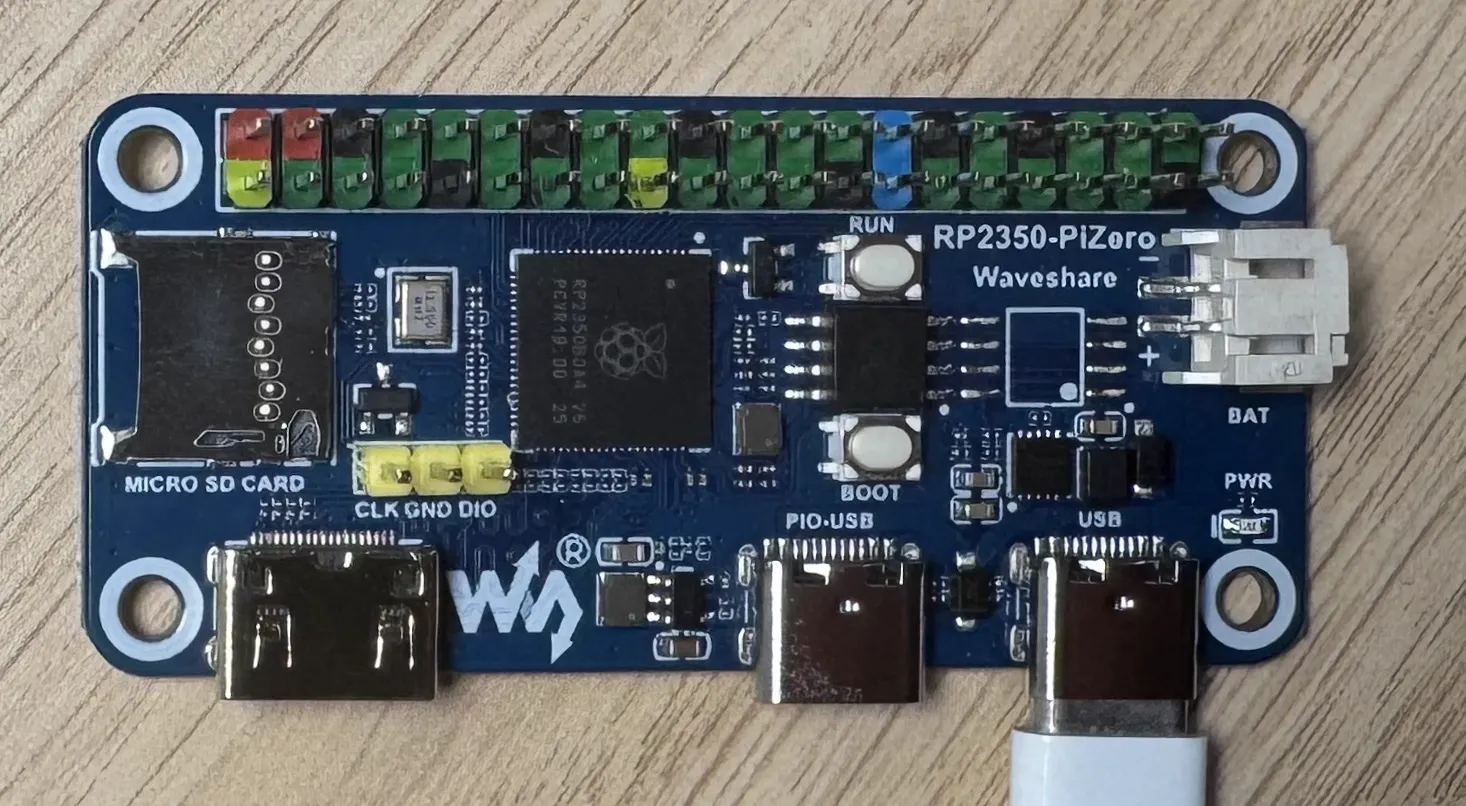
斥60大洋巨资购买一块相当漂亮的 WaveShare Pizero 开发板
板子的可玩性很强,配备内置 DVI 接口、TF 卡槽、PIO-USB 接口,40针 GPIO、PSRAM 扩展板,并且提供了 16MB 的外部 flash
使用 SDK! (其一)
B 话真多😅,倒是跑起来看看
幸运的是,rp 官方提供了 sdk,仓库地址: 🔗
SDK 提供了必要的头文件&库,用于使用 C/Cpp 为 RP 系列的 MCU 编写程序。
使用 SDK 点灯相当简单:
#include "pico/stdlib.h" // include pico-sdk 的标准库头文件
int main() {
gpio_init(15); // 初始化 GPIO15
gpio_set_dir(15, GPIO_OUT); // 设置为 输出模式
gpio_put(15, 1); // 输出高电平
while (1); // 死循环
}将 pico-sdk 的模板里面的 pico_sdk_import.cmake 复制到当前目录
然后只需在 CMakeLists.txt 里面 include(pico_sdk_import.cmake), 下面是一个最小模板:
cmake_minimum_required(VERSION 3.19.8)
include(pico_sdk_import.cmake)
project(Light_C_SDKv C CXX)
pico_sdk_init() # 初始化 SDK
add_executable(light_main
main.c
)
# 强制指定编译选项
target_compile_options(light_main PRIVATE
-mcpu=cortex-m33
-mthumb
)
# 链接标准库
target_link_libraries(light_main
pico_stdlib
)
# 生成烧录所需的特殊格式文件
pico_add_extra_outputs(light_main)
- pico_sdk_import.cmake 会用到 PICO_SDK_PATH 环境变量,在本演示环境中为 /usr/share/pico-sdk
- 在 build 目录下
cmake -DPICO_PLATFORM=rp2350 ..
-DPICO_PLATFORM=rp2350 是为了告诉 cmake 正在为 rp2350 开发,否则会使用老一代 rp2040 的配置 - cmake 会生成 Makefile,
make即可 - 末尾的
pico_add_extra_outputs()会自动把生成的 .elf 文件加工打包,最终生成能直接拖拽烧录的 .uf2 固件
烧录!
按住开发板的 boot 键,然后使用数据线将开发板连接至电脑,此时开发板会被识别为一个 usb 存储设备,可以选择将刚才生成的 light_main.uf2 直接复制进去,也可以使用官方提供的 picotool:
picotool load ./light_main.uf2 -xgpio15 的 led 就能点亮了。
使用 SDK! (其二)
什么鬼,这就能点亮了?
我们的 main 函数只用了4行😄
这是因为 pico-sdk 将复杂的操作封装成了简单的函数😇,比如,只需要gpio_init(15)就能初始化一个引脚。
本节将绕过 pico-sdk 的函数,使用汇编直接操作寄存器点灯。
Memory Mapped IO
- 🤔 CPU 只能执行指令集里面定义的操作,无法直接控制某一个引脚的状态,那么应该如何操控一个外设呢?
- 🤓 当然是配合外部电路咯
在嵌入式系统中,硬件寄存器会被映射到内存地址空间,也就是说,e.g., 地址0xd0000000 可能不是RAM地址,而是负责控制某个硬件的寄存器的地址。
非常棒设计,使 CPU 能像在内存里写数据一样,在硬件寄存器里面写数据。再配合硬件电路,实现特定功能。
GPIO(通用输入输出)
阅读 RP2350 的手册
GPIO 也是一种硬件外设
对于 RP2350,一个 GPIO 由多个硬件模块控制:
- PADS_BANK0: 物理引脚配置,决定引脚的电气特性,如:
输出驱动能力,上拉/下拉 电阻,输入缓冲 - IO_BANK0: 选择引脚复用
为了在有限的引脚上集成更多的功能,一个 GPIO 不会只对应一个用途,正如其名 通用 输入输出,它可能同时支持 SIO, PWM, UART, SPI 等功能。
通过向 GPIO 的 GPIOx_CTL 寄存器写特定值以选择对应的外设。 - SIO: CPU 直接操作 GPIO 时使用的控制器
负责 GPIO 输出使能,GPIO 输出高低电平,GPIO 输入读取。
通过向 GPIO_OE_SET 寄存器写值使能 GPIO,向 GPIO_OUT_SET 寄存器写值控制 GPIO 输出电平。
Reset Controller(复位控制)
RP2350 的复位控制器(Reset Controller)在上电时会让大多数外设保持在 Reset 状态。
在使用某个外设之前,必须先解除它的 Reset,并等待复位流程完成。
IO_BANK0 与 PADS_BANK0 属于普通 GPIO 外设模块,因此在使用 GPIO 前需要先解除它们的 Reset。
SIO 属于 CPU 的核心 IO 子系统,因此在处理器运行时默认已经可用,不受普通外设 Reset 控制。
总结一下大致流程:
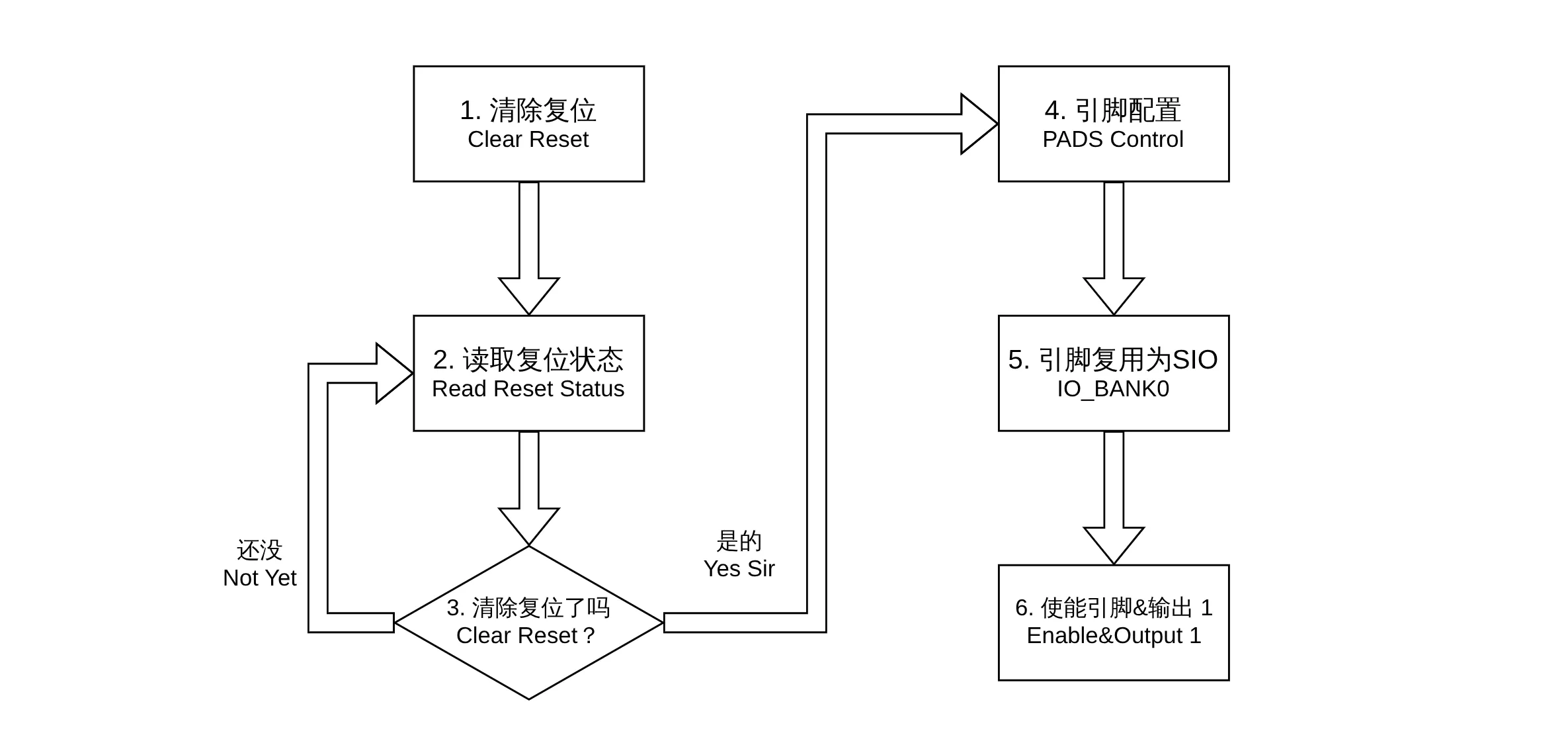
- 清除
IO_BANK0和PADS_BANK0复位:
查询手册得知,只需将 RESET Register(0x40020000) 的第 6, 9 位 (分别对应 IO_BANK0, PADS_BANK0) 设置为 0。 - 读取复位状态:
RP2350 提供了一个 RESET_DONE Register (0x40020008),通过读取第 6, 9 位是否为 1 来判断是否复位完成。 - 判断是否复位完成:
如果没有则回到上一步继续等待,如果完成则进行下一步。 - 物理引脚配置:
根据手册,GPIO 15 对应的 PADS_BANK0 寄存器地址为 0x40038040, 写入 0x36,设置 12mA Drive 并清除 isolation. - 将 GPIO15 复用为 SIO:
根据手册,GPIO15 对应的 GPIO15_CTL 寄存器地址为 0x4002807c, 写入 0x5. - 使能引脚并输出1:
GPIO_OE_SET(0xd0000038) 寄存器的每一位分别对应 GPIO0 至 GPIO31, 要使能 GPIO15 需要将第 15 个 bit 设置为 1, 使能 GPIO15; 同样的方法,将GPIO_OUT_SET(0xd0000018) 的第 15 个 bit 设置为 1, 使其输出高电平。
👈 点击展开 Light_Assembly_SDKv.s,或者访问 我的仓库🔗
.syntax unified
.cpu cortex-m33
.thumb
.global start
start:
@ 1. 解除复位 (IO_BANK0 和 PADS_BANK0)
ldr r0, =0x40020000 @ RESETS 基地址
ldr r1, =((1 << 6) | (1 << 9)) @ 构造掩码 (bit 6, bit 9)
ldr r2, [r0, #0x0] @ 读取 RESET 寄存器
bics r2, r2, r1 @ 清除对应位以解除复位
str r2, [r0, #0x0]
reset_wait:
ldr r2, [r0, #0x8] @ 2. 读取 RESET_DONE 寄存器
tst r2, r1 @ 3. 检查是否完成
beq reset_wait
@ 4. 物理引脚配置 (Pad Control)
ldr r0, =0x40038040 @ 直接指向 PADS_BANK0: GPIO15 寄存器 (0x40038000 + 0x04 + 15*4)
movs r1, #0x36 @ 12mA Drive, 清除 bit8(isolation)
str r1, [r0]
@ 5. 设置引脚复用功能 (GPIO Control -> SIO)
ldr r0, =0x4002807c @ 直接指向 IO_BANK0: GPIO15_CTRL (0x40028000 + 15*8 + 4)
movs r1, #0x5 @ funct 5: SIO
str r1, [r0]
@ 6. SIO 配置与点亮
ldr r0, =0xd0000000 @ SIO 基地址
ldr r1, =(1 << 15) @ GPIO 15 掩码
str r1, [r0, #0x038] @ GPIO_OE_SET: 设置为输出
str r1, [r0, #0x018] @ GPIO_OUT_SET: 拉高电平 (点亮)以上写了一个名为 start 的函数,接下来只需要在 main.c 里面调用即可。
为此还需要略微修改之前的 CMakeLists.txt:
👈 点击展开 CMakeLists.txt,或者访问 我的仓库🔗
cmake_minimum_required(VERSION 3.19.8)
include(pico_sdk_import.cmake)
project(Light_Assembly_SDKv C CXX ASM)
pico_sdk_init()
add_executable(Light_Assembly_SDKv
main.c
Light_Assembly_SDKv.s
)
target_compile_options(Light_Assembly_SDKv PRIVATE
-mcpu=cortex-m33
-mthumb
)
set_source_files_properties(Light_Assembly_SDKv.s PROPERTIES LANGUAGE ASM)
target_link_libraries(Light_Assembly_SDKv pico_stdlib)
pico_add_extra_outputs(Light_Assembly_SDKv)不出所料,gpio15 的 led 就能点亮了。
不用 SDK!🚫
等等,你还没解释 CPU 是怎么进入 main.c 的呢!💢
为了搞清楚这一点,接下来的部分将简单(?)介绍 RP2350 的启动过程,并不再使用 SDK, 使用汇编与链接脚本点灯。
地址映射
RP2350 是32 位 CPU, 具有 2^32bit = 4GB 的寻址空间,这些空间被分配给了 ROM, XIP, SRAM, 外设(Peripherals), 私有外设(Private Peripherals)。
| Region | 寻址范围 | 大小 | 功能 |
|---|---|---|---|
| ROM | 0x00000000 - 0x0fffffff | 256 MB | Boot Rom |
| XIP | 0x10000000 - 0x11ffffff | 32 MB | 外部 flash |
| SRAM | 0x20000000 - 0x20081fff | 520 KB | 片上RAM |
| Peripherals | 0x40000000 - 0x4fffffff | 256 MB | 外设寄存器 |
| Private Peripherals | 0xe0000000 - 0xe00fffff | 1 MB | 私有外设 |
-
Boot ROM:
Boot ROM 是芯片内部固化的一段只读程序,通电后最先执行,负责初始化硬件,加载程序,跳转到用户程序入口等。 -
XIP:
在一般的计算机中,运行一段程序需要将指令搬到 RAM 里面,然而为了节省 RAM 和硬件复杂度, RP2350 使用了 XIP(Execute In Place)XIP 将 0x10000000 - 0x11ffffff 这段地址映射到外部存储设备(flash),CPU 通过 QSPI 直接从 flash 取指令运行,无需将指令复制到 RAM。 因此,程序代码会直接存放在外部 flash 里面。
-
SRAM:
SRAM 是芯片内部高速读写内存,负责存放调用栈,堆,临时变量等。 -
Peripherals:
即前文所讲的 Memory Mapped IO, 便于 CPU 直接操作硬件。 -
Private Peripherals: 这一部分属于 Cortex-M 内核私有外设,作为 ARM Cortex-M33 内核自身的一部分。
启动流程
阅读数据手册第5章,详细介绍了 RP2350 的启动过程
相比 RP2040, RP2350 的启动流程复杂了很多。
RP2350 新增了:
- Secure Boot
- OTP Boot
- RAM Image Boot
- 双核启动同步
- TrustZone
- 更多 Boot Mode
RP2350 支持多种启动方式,
手册对 RP2350 启动过程相比于 RP2040 从23 页增加到了 88 页😅,这里偷点懒,省略几个(很多)繁琐的步骤,只列出本项目的大致过程:
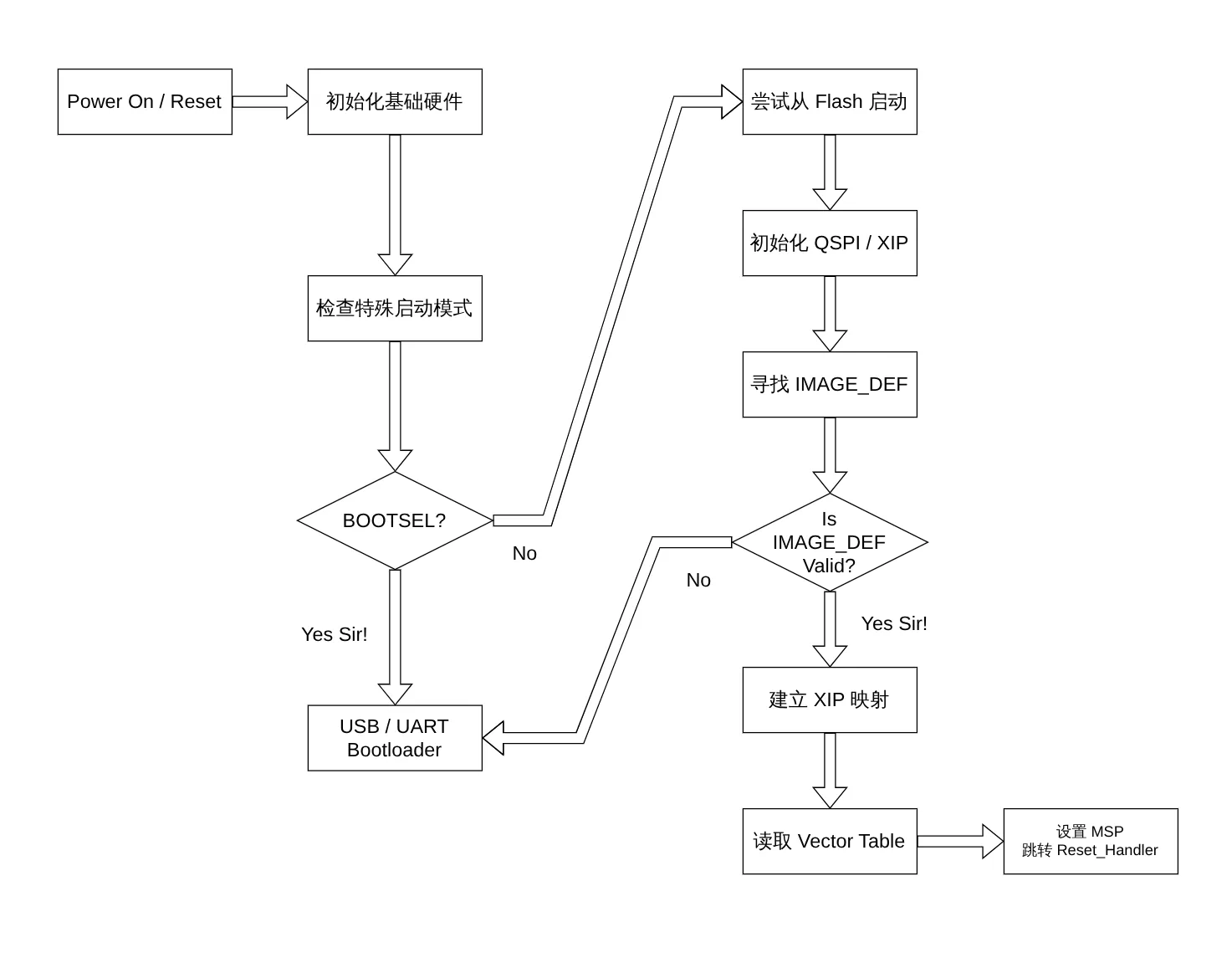
-
上电复位
CPU 处于复位状态,时钟以较低频率运行,随后将从 BootROM(0x00000000) 开始运行 -
检查特殊启动方式
RP2350 支持许多启动方式,如 OPT, SRAM Image, Rescue…
BootROM 会读取 POWMAN, Watchdog Scratch Register 等寄存器来进行判断。
不过本项目使用最常见的从 flash image 启动,无需涉及以上的启动方式。 -
检查 BOOTSEL
BOOTSEL 是开发板上的 BOOT 按钮,若被 BootROM 检测到按下,则进入 USB/串口 Bootloader,并设置时钟,等待外部设备下载程序。
这也是为什么在前面的章节中,烧录程序时需要按住 BOOT 按钮,再连接 USB. -
初始化 QSPI
如果 BOOT 按钮没有被按下,则尝试从 flash 启动,为此需要初始化 QSPI / XIP,让 CPU 能访问 外部 flash。 -
寻找
IMAGE_DEF
Boot ROM 会在 flash 的前 4KB 寻找合法的 IMAGE_DEF 镜像,IMAGE_DEF 用于告诉 BootROM 后面的指令属于哪种架构(ARM/RISC-V), 程序入口(ENTRY Point), Vector Table 在哪里,是否包含 Secure Boot 签名。 -
在识别到 合法的 IMAGE_DEF 后会建立正式 XIP 执行环境,准备让 CPU 从 flash 连续取指令。
-
根据 IMAGE_DEF, CPU 读取 Vector Table,跳转至 ENTRY Point,开始执行用户编写的指令,至此 BootROM 结束。
Implementation
启动的过程虽复杂,其实需要手动实现的内容不多,最主要的是一个合法的 IMAGE_DEF 头,一个简单的 Vector Table, 以及一个链接脚本。
在之前的示例里面,我们使用的 pico-sdk 为我们写好了这些东西,接下来将手动实现。
IMAGE_DEF
首先要解决的是IMAGE_DEF
RP2350 定义了一套称为 Metadata Block 的镜像描述格式,其结构如下:
+------------+
| HEADER | <= 头,作为一个合法的 block 的开始
+------------+
| ITEM 0 | <= 第一个 item
+------------+
| ITEM 1 |
+------------+
| ... |
+------------+
| LAST_ITEM | <= LAST_ITEM, 它用于告诉 BootROM 前面 item 总长度是多少
+------------+
| LINK | <= 指向下一个 block 的相对地址偏移量(有点像循环链表)
+------------+
| FOOTER | <= 尾。作为一个合法的 block 的结束
+------------+一个 Metadata Block 可以有多个 item 数据手册已经为我们提供了一个最简的 IMAGE_DEF😋
.section .image_def, "a" @ "a" 表示只读可分配
image_def:
.word 0xffffded3 @ magic number 手册规定必须为此数字作为开头
.word 0x10210142 @ image_def item, 代表是一个运行在 RP2350 上的 ARM 可执行程序
.word 0x000001ff @ LAST_ITEM
.word 0x00000000 @ 相对地址偏移量
.word 0xab123579 @ footer number 手册规定必须为此数字作为结尾翻译一下:
+------------+
| HEADER | <= 头,作为一个合法的 block 的开始 = 0xffffded3
+------------+
| ITEM 0 | <= 第一个 item, 就是image_def item = 0x10210142
+------------+
| LAST_ITEM | <= LAST_ITEM, = 0x000001ff, 包含 size_flag, item_type,用于告诉 BootROM 当前 block 的 item 数量,并终止 item 列表解析
+------------+
| LINK | <= 指向下一个 block 的相对地址偏移量 = 0, 指向自己
+------------+
| FOOTER | <= 尾。作为一个合法的 block 的结束 = 0xab123579
+------------+注意到,虽然写好了一个合法的 IMAGE_DEF,但仍没有告诉程序入口在哪里。
实际上还可以定义 ENTRY Point Vector Table item,用于显示指定程序入口和向量表的位置,在这个实例中并没有定义,因此 BootROM 会采用 Cortex-M 的默认方式:
- 将 flash 起始位置(0x10000000)视为 Vector Table 开始位置
- 读取 0x10000000 +0x0 为初始 MSP
- 读取 0x10000000 +0x4 为 Reset_Handler 地址
- 设置 MSP
- 跳转至 Reset_Handler 开始执行
总结:在 flash 的开头存放 Vector Table,然后放 IMAGE_DEF,最后是 编写的指令,BootROM 先在 flash 前 4KB 内寻找 IMAGE_DEF,确认该镜像合法;随后按照 Cortex-M 约定读取 Vector Table,并进入 Reset_Handler。
向量表(Vector Table)
由于这个项目只涉及到控制 GPIO 输出,并未使用到复杂的中断,只需要提供启动所必需的最小 Vector Table:
.section .vectors, "ax"
.equ STACK_TOP_ADDRESS, 0x20082000
.global vector_initialization
vector_initialization:
.word STACK_TOP_ADDRESS @ 栈顶地址
.word stack_initialization @ Reset Handler 地址(含 Thumb 位)
@ 或者 直接跳转到主程序
@ .word STACK_TOP_ADDRESS
@ .word _start虽然在 Vector Table 里面定义了调用栈顶地址,许多项目仍会在 Reset Handler 里面重新设置 MSP.
.global stack_initialization
.thumb_func
stack_initialization:
ldr r0, =STACK_TOP_ADDRESS
mov sp, r0 @ 设置 MSP
b _start @ 跳转至主程序_start 就是之前写的start函数。
链接脚本(Linker Script)
OK, 现在我们的 flash 内部的布局如下:
+----------------------+
| Vector Table | <= 0x10000000
+----------------------+
| IMAGE_DEF |
+----------------------+
| Reset_Handler |
| Application Code |
+----------------------+目前我们已经写好了
- IMAGE_DEF
- Vector Table
- Reset Handler
但是编译器不知道将这些内容放到什么位置
链接脚本登场!
[Source Code] xxx.s
|
| assembler
|
|
V
[Object File] xxx.o
| (只有 sections, 没有最终地址)
|
| linker + linker script
| .vectors -> FLASH
| .bss -> RAM
V
[ELF Executable] xxx.elf
| (有最终地址)
|
|
V
0x10000000 -> Vector Table
0x10000xxx -> IMAGE_DEF
0x10000xxx -> 主程序
0x20000000 -> SRAM
汇编器只负责将汇编指令翻译为机器码,
生成的 .o 文件里面有 .text、.vectors、.bss 等 section, 但并不知道这些 section 应该位于什么位置。
决定程序内存布局的是链接器,
链接器根据链接脚本的规则,将不同 section 放入指定内存区域。
在本项目中,我们只需要将 Vector Table 放在 flash 的开头,IMAGE_DEF 随其后,最后放编写的指令。
链接脚本如下:
👈 点击展开 Light_Assembly_NoSDKv.ld,或者访问 我的仓库🔗
MEMORY
{
/* 外部 QSPI Flash 的 XIP 映射区域 */
/* 程序代码会被放在这里,并直接从 flash 执行 */
FLASH (rx) : ORIGIN = 0x10000000, LENGTH = 16M
/* 片上 SRAM */
SRAM (rwx) : ORIGIN = 0x20000000, LENGTH = 520K
}
SECTIONS
{
.text :
{
/* Vector Table */
KEEP(*(.vectors))
/* IMAGE_DEF */
KEEP(*(.image_def))
/* 其余代码段 */
*(.text*)
} > FLASH
/* 未初始化全局变量 */
.bss :
{
*(.bss*)
} > SRAM
/* 已初始化全局变量 */
.data :
{
*(.data*)
} > SRAM
}构建!
目前已经有了:
.
├── Light_Assembly_NoSDKv.ld
└── Light_Assembly_NoSDKv.s终于可以开始编译了🤓
将汇编源码转换为目标文件:
arm-none-eabi-as -mcpu=cortex-m33 -mthumb -g Light_Assembly_NoSDKv.s -o Light_Assembly_NoSDKv.o链接,生成 elf 文件:
arm-none-eabi-ld -nostdlib -T Light_Assembly_NoSDKv.ld Light_Assembly_NoSDKv.o -o Light_Assembly_NoSDKv.elf将 ELF 提取为纯二进制:
arm-none-eabi-objcopy -O binary Light_Assembly_NoSDKv.elf Light_Assembly_NoSDKv.bin最后转换为 RP2350 USB Bootloader 可识别的 UF2:
picotool uf2 convert Light_Assembly_NoSDKv.bin Light_Assembly_NoSDKv.uf2😵💫😵💫😵💫,还是写一个 Makefile 吧:
👈 点击展开 Makefile,或者访问 我的仓库🔗
# Program Settings
NAME = Light_Assembly_NoSDKv
# Toolchain
AS = arm-none-eabi-as
LD = arm-none-eabi-ld
OBJCOPY = arm-none-eabi-objcopy
OBJDUMP = arm-none-eabi-objdump
PICOTOOL = picotool
AS_FLAGS = -mcpu=cortex-m33 -mthumb --warn --fatal-warnings -g
LD_FLAGS = -nostdlib -g
OBJDUMP_FLAGS = -D -s -f -r -x -WL --architecture=cortex-m33
LD_SCRIPT = $(NAME).ld
OUTPUT_DIR = bin
DUMP_DIR = dump
S_FILES = $(wildcard *.s)
O_FILES = $(patsubst %.s,$(OUTPUT_DIR)/%.o,$(S_FILES))
all: clean $(OUTPUT_DIR) $(DUMP_DIR) $(OUTPUT_DIR)/$(NAME).uf2
$(OUTPUT_DIR):
mkdir -p $(OUTPUT_DIR)
$(DUMP_DIR):
mkdir -p $(DUMP_DIR)
$(OUTPUT_DIR)/%.o: %.s
$(AS) $(AS_FLAGS) $< -o $@
$(OUTPUT_DIR)/$(NAME).bin: $(LD_SCRIPT) $(O_FILES)
$(LD) $(LD_FLAGS) -T $(LD_SCRIPT) $(O_FILES) -o $(OUTPUT_DIR)/$(NAME).elf
$(OBJDUMP) $(OBJDUMP_FLAGS) $(OUTPUT_DIR)/$(NAME).elf > $(OUTPUT_DIR)/$(NAME).elf.dump
$(foreach obj,$(O_FILES),$(OBJDUMP) $(OBJDUMP_FLAGS) $(obj) > $(obj).dump;)
$(OBJCOPY) -O binary $(OUTPUT_DIR)/$(NAME).elf $(OUTPUT_DIR)/$(NAME).bin
mv $(OUTPUT_DIR)/*.dump $(DUMP_DIR)
$(OUTPUT_DIR)/$(NAME).uf2: $(OUTPUT_DIR)/$(NAME).bin
$(PICOTOOL) uf2 convert $(OUTPUT_DIR)/$(NAME).bin $(OUTPUT_DIR)/$(NAME).uf2
clean:
rm -Rf $(OUTPUT_DIR)
rm -Rf $(DUMP_DIR)end
References
官方文档
- Raspberry Pi RP2350 Datasheet
https://datasheets.raspberrypi.com/rp2350/rp2350-datasheet.pdf - ARM Cortex-M33 Architecture Reference Manual
https://developer.arm.com/documentation/ddi0553/latest
项目仓库
- RP2040 / RP2350 pico-sdk
https://github.com/raspberrypi/pico-sdk - Alex Kim 的仓库
https://github.com/alexdbkim/rp2350-bare-metal-arm-assembly - Kevin Thomas 的仓库
https://github.com/mytechnotalent/RP2350_UART_Driver - 本项目源码
https://github.com/Hi-Jiang-a11y/RP2350_Boom
相关视频
- RP2040 - NO SDK! Assembly Language Programming - BMA -04
https://www.youtube.com/watch?v=nM8lVeOYblY
工具链
- GNU Arm Embedded Toolchain
https://developer.arm.com/downloads/-/gnu-rm - picotool(UF2 转换 / 烧录工具) https://github.com/raspberrypi/picotool
Comments
Comment freeeeely!